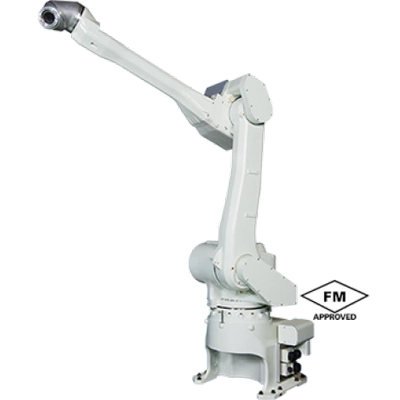
Модель KJ264
Технические характеристики
Степень свободы: 6 осей
Зона досягаемости*✽1: 2640 мм
Тип запястья: 3Rø70 ✽2
Точность позиционирования✽3: ±0.5 мм
Максимальная скорость: 1.5 м/сек
Максимальная полезная нагрузка: Запястье:15кг; Рука:25кг
Диапазон рабочих температур среды: 0~40°C
Взрывозащищенность: Сочетание датчика внутреннего давления и искробезопасного исполнения (Ⅱ2G Expxib ⅡB T4 / Exib ⅡB T4)
Цвет корпуса: соответствует Munsell 10GY9/1
Масса робота: 540 кг
Диапазон перемещения
JT1 Поворот: ±120°
JT2 Нижний рычаг: +130°~-80°
JT3 Верхний рычаг: +90°~-65°
JT4: ±720°
JT5: ±720°
JT6: ±410°
Момент силы
JT4: 56.2 Н*м
JT5: 43.4 Н*м
JT6: 22.0 Н*м
Момент инерции
JT4: 2.19 кг*м²
JT5: 1.31 кг*м²
JT6: 0.33 кг*м²
Контроллер: Америка - Е35, Европа - Е45, Япония, Азия - Е25
✽1: Запястье 3R (Roll Roll Roll) 6-ти осевого робота - это его часть от центра JT1 до пересечения JT4 и JT5.
✽2: Встроенный шланг.
✽3: Значение соответствует ISO9283.